福建物构所在航空薄壁结构机器人装配系统精准定位研究中取得新进展
更新日期:2023-09-28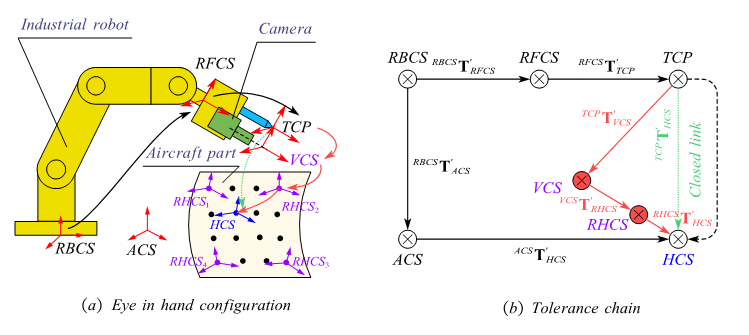
图1. 视觉系统手眼配置方式及其容差链
装配是航空制造过程的重要环节,约占其总劳动量的40%-50%,很大程度上决定了飞机的最终产品质量、制造成本和供货周期。基于铆钉和螺栓等紧固件的机械连接是飞机装配的主要连接方式,一架大型飞机上的紧固件安装孔可达数百万个。考虑高效率和高柔性,研究人员开发了机器人装配系统,用于航空薄壁结构制孔和连接。机器人装配系统和待加工航空结构的名义模型是加工程序产生的基础,然而在装配现场两者的实际状态均偏离其名义模型,导致两者之间相对定位误差的产生,造成了较大的紧固件安装孔位置误差,降低了航空结构的疲劳寿命。
近日,中国科学院福建物质结构研究所杨永泰课题组,在前期航空结构自动化制孔相关研究基础上,发展了一种机器人装配系统定位精度增强技术。对机器人装配系统与航空结构相对定位误差的形成进行了分析和建模,引入测量装置实现相对定位误差测量和补偿,从容差管理的角度对测量装置不同配置方式下的相对定位误差进行了理论比较,推荐了视觉系统手眼配置方式。基于定位误差雅克比,探索了手眼偏置对定位精度的影响,指导了末端执行器设计和视觉坐标系设置。提出了在机手眼标定和系统定位方法,消除了机器人绝对定位误差相异的影响。进而开发了多功能机器人装配系统的集成控制系统。该研究为航空结构机器人制孔和连接系统的定位精度增强提供了理论依据。
相关成果近期发表在国际学术期刊《工业信息集成》上(Positioning accuracy enhancement of a robotic assembly system for thin-walled aerostructure assembly. Journal of Industrial Information Integration 2023, 35, 100518),论文第一作者为梅标助理研究员,通讯作者为杨永泰高级工程师。
论文链接:https://doi.org/10.1016/j.jii.2023.100518
(杨永泰课题组供稿)